#include <Sensor.h>
Public Member Functions | |
| ASensor (const FObjectInitializer &ObjectInitializer) | |
| FString | ExportToJsonFile (const FString &FileName) |
| virtual ESensorTypes | GetSensorType () const |
| FString | GetSensorIdentifier () const |
| void | SetSensorIdentifier (const FString newIdentifier) |
| FString | GetSensorName () const |
| virtual FString | GetParametersAsString () const |
| AVehicle * | IsAttachedToVehicle () const |
| void | SetSensorName (const FString newName) |
| FString | GetTopicName () |
| UTopic * | GetROSTopic () const |
| void | SetSimulateSensor (bool SimulateSensor) |
| bool | CanSimulateSensor () const |
| ASensorModel * | GetSensorModel () const |
| void | SetSensorModel (ASensorModel *NewSensorModel) |
| FORCEINLINE bool | IsROSConnected () const |
| UROSIntegrationGameInstance * | GetROSGameInstance () const |
| virtual FString | GetActorID_Implementation () const override |
| virtual FString | GetActorName_Implementation () const override |
| virtual FString | GetActorInformation_Implementation () const override |
| virtual void | SetActorName_Implementation (const FString &NewActorName) override |
| virtual void | SetActorIDAndName_Implementation (const FString &NewActorName, const FString &NewID) override |
| void | SetParentActorPtr (AActor *ParentActorPtr) |
 Public Member Functions inherited from IActorInformation Public Member Functions inherited from IActorInformation | |
| FString | GetActorID () const |
| FString | GetActorName () const |
| FString | GetActorInformation () const |
| void | SetActorName (const FString &NewActorName) |
| void | SetActorIDAndName (const FString &NewActorName, const FString &NewID) |
Static Public Member Functions | |
| static void | HideComponentForAllCameras (UPrimitiveComponent *PrimitiveComponent) |
| static TMap< FString, FColor > | GetSemanticColors () |
| static TArray< TWeakObjectPtr< UPrimitiveComponent > > | GetComponentsToHide () |
| Static Public Member Functions inherited from IActorInformation | |
| static void | SetAndValidateActorIDAndName (FString &ActorName, FString &ActorID, TWeakObjectPtr< AActor > Actor) |
| static bool | DestroyActorByID (const FString &ID) |
| static AActor * | GetActorByID (const FString &ID) |
| template<typename T > | |
| static TArray< T * > | GetActorsWithInterface () |
| static void | PrintAllIds () |
Public Attributes | |
| FSensorDestroy | OnSensorDestroy |
| FString | AttachedToComponent |
| FName | AttachedToBone |
Protected Member Functions | |
| virtual void | BeginPlay () override |
| virtual void | EndPlay (const EEndPlayReason::Type EndPlayReason) override |
| FString | CreateTimeStampString () const |
| virtual void | CreateROSTopic () |
| virtual void | DestroyROSTopic () |
| virtual void | CreateDataSavePath () |
| bool | IsLogFileCreated () |
| virtual void | CreateLogFile () |
| void | WriteToLogFile (const FString &Message) |
Static Protected Member Functions | |
| template<typename InStructType > | |
| static FString | StructToString (const InStructType &InStruct) |
Protected Attributes | |
| UTopic * | ROSTopic = nullptr |
| bool | SendDataToROS = true |
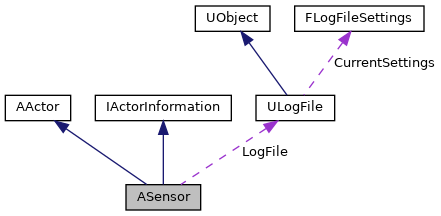
| ULogFile * | LogFile = nullptr |
| AActor * | ParentActor = nullptr |
| FString | FileSavePath |
| UROSIntegrationGameInstance * | ROSInstance = nullptr |
Static Protected Attributes | |
| static FPrimitiveAdded | OnPrimitiveAdded |
| static const FName | NiagaraPointsInt = "User.PointCount" |
| static const FName | NiagaraHitPoints = "User.HitPoints" |
| static const FName | NiagaraHitColors = "User.HitColors" |
| static const FName | NiagaraPointsFloat = "User.Test" |
Private Member Functions | |
| void | ROSBridgeStateChanged (EROSState ROSState) |
Private Attributes | |
| TObjectPtr< ASensorModel > | SensorModel |
| FString | SensorIdentifier |
| FString | SensorName |
| bool | SimulateThisSensor = true |
| bool | ROSConnected = false |
Static Private Attributes | |
| static TArray< TWeakObjectPtr< UPrimitiveComponent > > | ComponentsToHide |
Detailed Description
Constructor & Destructor Documentation
◆ ASensor()
| ASensor::ASensor | ( | const FObjectInitializer & | ObjectInitializer | ) |
Definition at line 27 of file Sensor.cpp.
Member Function Documentation
◆ BeginPlay()
|
overrideprotectedvirtual |
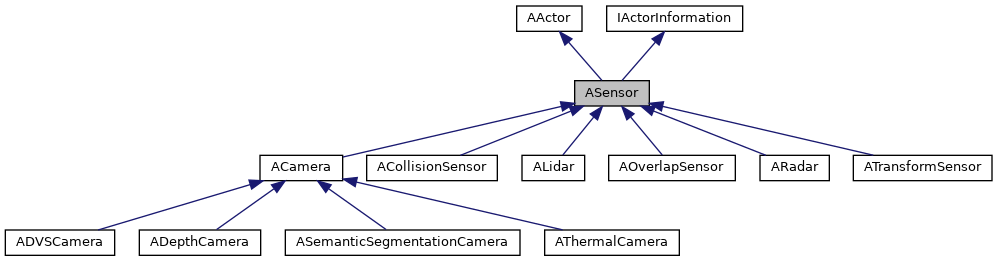
Reimplemented in ACamera, ACollisionSensor, ALidar, AOverlapSensor, ARadar, and ATransformSensor.
Definition at line 33 of file Sensor.cpp.
References USensorManager::AddSensor(), Collision, UAgrarsenseStatics::GetROSGameInstance(), UAgrarsenseStatics::GetROSHandle(), GetSensorType(), SimulatorLog::Log(), NONE, UROSHandler::OnROSStateChanged, Overlap, FTransformSensorParameters::OwningActor, FSensorSpawnParameters::Parent, ROSBridgeStateChanged(), ROSConnected, ROSInstance, FTransformSensorParameters::SaveTransformDataToDisk, FSensorSpawnParameters::SensorIdentifier, FSensorSpawnParameters::SensorName, FSensorSpawnParameters::SimulateSensor, USensorFactory::SpawnTransformSensor(), FSensorSpawnParameters::Transform, and Transform.
◆ CanSimulateSensor()
|
inline |
Checks whether this sensor can be simulated.
- Returns
- True if the sensor can be simulated, false otherwise.
Definition at line 170 of file Sensor.h.
Referenced by ADVSCamera::ChangeDVSCameraParameters(), ALidar::ChangeLidarParameters(), ARadar::ChangeRadarParameters(), ACollisionSensor::OnActorHit(), ACollisionSensor::OnComponentHit(), ACamera::ShouldSimulate(), ALidar::SimulateRaycastLidar(), ARadar::Tick(), and ATransformSensor::TickParallel().
◆ CreateDataSavePath()
|
protectedvirtual |
Creates data save path for this sensor. Can be overriden if needed.
Reimplemented in ACollisionSensor, AOverlapSensor, and ATransformSensor.
Definition at line 254 of file Sensor.cpp.
References FileSavePath, GetActorID_Implementation(), UAgrarsensePaths::GetDataFolder(), IsAttachedToVehicle(), and Vehicle.
Referenced by ACamera::Init(), and ALidar::Init().
◆ CreateLogFile()
|
protectedvirtual |
Create Text file for this sensor if it has not been created already. Text file will be created to ROOT/Data/Run/Logs directory. Filename will be SensorName_ID_UnixTimestamp.txt Can be overriden by individual sensor if needed.
Reimplemented in ACamera, ACollisionSensor, ALidar, AOverlapSensor, and ATransformSensor.
Definition at line 272 of file Sensor.cpp.
References ULogFile::Create(), FLogFileSettings::FileCreationOptions, FLogFileSettings::FileWriteOptions, GetSensorName(), FLogFileSettings::KeepFileOpen, LogFile, Overwrite, Queue, and FLogFileSettings::QueueLength.
Referenced by WriteToLogFile().
◆ CreateROSTopic()
|
protectedvirtual |
Creates ROS Topic for this sensor. Can be overriden by individual sensor if needed.
Reimplemented in ADVSCamera, and ATransformSensor.
Definition at line 197 of file Sensor.cpp.
References Collision, UEnumUtilities::ConvertSensorTypeToString(), DepthCamera, DVSCamera, GetSensorIdentifier(), GetSensorName(), GetSensorType(), InstanceSegmentationCamera, IsROSConnected(), Lidar, SimulatorLog::Log(), Overlap, Radar, RGBCamera, ROSInstance, ROSTopic, SemanticSegmentationCamera, SendDataToROS, ThermalCamera, and Transform.
Referenced by ALidar::ChangeParameters(), ACollisionSensor::Init(), AOverlapSensor::Init(), ARadar::Init(), ROSBridgeStateChanged(), and ACamera::SetupCamera().
◆ CreateTimeStampString()
|
protected |
Definition at line 330 of file Sensor.cpp.
Referenced by AOverlapSensor::BuildAndSendMessage(), ACollisionSensor::CollsionDataToString(), ACamera::SaveCameraMetaDataToDisk(), ALidar::SaveLidarMetaDataToDisk(), and ATransformSensor::SaveTransformMetaDataToDisk().
◆ DestroyROSTopic()
|
protectedvirtual |
Destroy created ROS Topic. Can be overriden by individual sensor if needed.
Reimplemented in ATransformSensor.
Definition at line 185 of file Sensor.cpp.
References ROSTopic.
Referenced by EndPlay(), and ROSBridgeStateChanged().
◆ EndPlay()
|
overrideprotectedvirtual |
Reimplemented in AInstanceSegmentationCamera, ACamera, ADepthCamera, ADVSCamera, AThermalCamera, ACollisionSensor, ALidar, AOverlapSensor, ARadar, and ATransformSensor.
Definition at line 101 of file Sensor.cpp.
References ComponentsToHide, ULogFile::Destroy(), DestroyROSTopic(), UAgrarsenseStatics::GetROSHandle(), GetSensorIdentifier(), GetSensorType(), SimulatorLog::Log(), LogFile, UROSHandler::OnROSStateChanged, OnSensorDestroy, USensorManager::RemoveSensor(), ROSBridgeStateChanged(), and ROSInstance.
◆ ExportToJsonFile()
| FString ASensor::ExportToJsonFile | ( | const FString & | FileName | ) |
Export this Sensor and parameters to a JSON file.
- Parameters
-
FileName The name of the file without extension.
- Returns
- FString representing saved Json file path, or an empty string if the export fails.
Definition at line 154 of file Sensor.cpp.
References USimulatorJsonExporter::ExportSensorToJSON().
Referenced by UROSCommands::HandleExportSensors().
◆ GetActorID_Implementation()
|
inlineoverridevirtual |
Definition at line 216 of file Sensor.h.
Referenced by CreateDataSavePath(), ACollisionSensor::CreateDataSavePath(), AOverlapSensor::CreateDataSavePath(), and ATransformSensor::CreateDataSavePath().
◆ GetActorInformation_Implementation()
|
inlineoverridevirtual |
Definition at line 226 of file Sensor.h.
References UEnumUtilities::ConvertSensorTypeToString(), and Transform.
◆ GetActorName_Implementation()
|
inlineoverridevirtual |
◆ GetComponentsToHide()
|
inlinestatic |
Static method to retrieve an array of weak pointers to UPrimitiveComponents that are ready to be hidden.
- Returns
- An array of TWeakObjectPtr<UPrimitiveComponent> containing components ready to be hidden.
Definition at line 270 of file Sensor.h.
Referenced by ACamera::BeginPlay().
◆ GetParametersAsString()
|
inlinevirtual |
Get this sensor parameters as string
Reimplemented in ACamera, ADepthCamera, ADVSCamera, AThermalCamera, ALidar, AOverlapSensor, and ARadar.
Definition at line 105 of file Sensor.h.
◆ GetROSGameInstance()
|
inline |
Retrieves the instance of the ROSIntegrationGameInstance set in ASensor::BeginPlay.
- Returns
- A pointer to the associated ROSIntegrationGameInstance.
◆ GetROSTopic()
|
inline |
Retrieves the ROS topic associated with this sensor.
- Returns
- A pointer to the associated ROS topic or nullptr.
Definition at line 150 of file Sensor.h.
Referenced by AOverlapSensor::BuildAndSendMessage(), ACollisionSensor::SendCollisionData(), ALidar::SendDataToTopic(), ACamera::SendImageDataToROS(), ARadar::SendRadarData(), and ATransformSensor::SendTransformDataToROS().
◆ GetSemanticColors()
|
static |
Definition at line 325 of file Sensor.cpp.
References USemanticColors::GetSemanticColors().
Referenced by ALidar::BeginPlay().
◆ GetSensorIdentifier()
|
inline |
Get sensor's identifier
- Returns
- sensor identifier as FString
Definition at line 75 of file Sensor.h.
Referenced by CreateROSTopic(), ADVSCamera::CreateROSTopic(), ATransformSensor::CreateROSTopic(), EndPlay(), ADVSCamera::Init(), USensorFactory::SetSensorIdentifierAndNameWithFallbacks(), and ACamera::SetupCamera().
◆ GetSensorModel()
|
inline |
Retrieves the sensor model associated with this sensor.
- Note
- The returned pointer can be nullptr if no sensor model is set for this sensor.
- Returns
- A pointer to the associated sensor model or nullptr if not set.
Definition at line 181 of file Sensor.h.
Referenced by USimulatorJsonParser::AttachActorToSpectatorCamera().
◆ GetSensorName()
|
inline |
Get sensor's name
- Returns
- Name
Definition at line 96 of file Sensor.h.
Referenced by ACamera::AddPostProcessingMaterial(), CreateLogFile(), CreateROSTopic(), and USimulatorJsonExporter::CreateSensorJSONObject().
◆ GetSensorType()
|
inlinevirtual |
Get type of the sensor
- Returns
- Sensor's type
Reimplemented in ACamera, ADepthCamera, ADVSCamera, AInstanceSegmentationCamera, ASemanticSegmentationCamera, AThermalCamera, ACollisionSensor, ALidar, AOverlapSensor, ARadar, and ATransformSensor.
Definition at line 65 of file Sensor.h.
References NONE.
Referenced by BeginPlay(), CreateROSTopic(), USensorUtilities::DestroyAllSensors(), EndPlay(), USimulatorJsonExporter::ExportSensorToJSON(), USensorFactory::SetSensorIdentifierAndNameWithFallbacks(), and USensorFactory::SpawnModelClassForSensor().
◆ GetTopicName()
|
inline |
◆ HideComponentForAllCameras()
|
static |
Static method to hide a specified primitive component for all cameras in the World.
- Parameters
-
PrimitiveComponent The UPrimitiveComponent to be hidden for all cameras.
Definition at line 315 of file Sensor.cpp.
References ComponentsToHide, and OnPrimitiveAdded.
Referenced by ALidar::BeginPlay(), ASpectator::BeginPlay(), USensorUtilities::HideComponentForAllCameraSensors(), and ARadar::Init().
◆ IsAttachedToVehicle()
| AVehicle * ASensor::IsAttachedToVehicle | ( | ) | const |
Definition at line 159 of file Sensor.cpp.
References ParentActor.
Referenced by CreateDataSavePath(), ACollisionSensor::CreateDataSavePath(), AOverlapSensor::CreateDataSavePath(), ATransformSensor::CreateDataSavePath(), ACollisionSensor::CreateLogFile(), AOverlapSensor::CreateLogFile(), and ATransformSensor::CreateLogFile().
◆ IsLogFileCreated()
|
inlineprotected |
◆ IsROSConnected()
|
inline |
Check if ROS is connected.
- Returns
- True if connected, false otherwise.
Definition at line 201 of file Sensor.h.
Referenced by AOverlapSensor::BuildAndSendMessage(), CreateROSTopic(), ADVSCamera::CreateROSTopic(), ACollisionSensor::SendCollisionData(), ALidar::SendDataToTopic(), ACamera::SendImageDataToROS(), ADVSCamera::SendRawDVSImageDataToROS(), and ATransformSensor::TickParallel().
◆ ROSBridgeStateChanged()
|
private |
Callback when ROS Bridge state changed. Must be marked as UFUNCTION.
Definition at line 169 of file Sensor.cpp.
References Connected, CreateROSTopic(), DestroyROSTopic(), Disconnected, and ROSConnected.
Referenced by BeginPlay(), and EndPlay().
◆ SetActorIDAndName_Implementation()
|
inlineoverridevirtual |
Definition at line 246 of file Sensor.h.
◆ SetActorName_Implementation()
|
inlineoverridevirtual |
◆ SetParentActorPtr()
|
inline |
◆ SetSensorIdentifier()
|
inline |
Set sensor's identifier
- Parameters
-
newIdentifier New identifier
Definition at line 85 of file Sensor.h.
Referenced by USensorFactory::SetSensorIdentifierAndNameWithFallbacks().
◆ SetSensorModel()
|
inline |
Sets the sensor model for sensor.
- Parameters
-
NewSensorModel The new sensor model to set.
Definition at line 191 of file Sensor.h.
Referenced by USensorFactory::SpawnModelClass().
◆ SetSensorName()
|
inline |
Set sensor's name
- Parameters
-
newIdentifier New name
Definition at line 123 of file Sensor.h.
Referenced by USensorFactory::SetSensorIdentifierAndNameWithFallbacks().
◆ SetSimulateSensor()
|
inline |
Set simulate this sensor
- Parameters
-
bSimulateSensor bool
Definition at line 160 of file Sensor.h.
Referenced by UROSCommands::HandleSetSensorEnabled(), ACamera::Init(), ACollisionSensor::Init(), ALidar::Init(), AOverlapSensor::Init(), ARadar::Init(), ATransformSensor::Init(), USensorUtilities::SetSimulateAllSensors(), and USensorUtilities::SetSimulateSensorsAttachedToVehicle().
◆ StructToString()
|
inlinestaticprotected |
Templated function to convert any struct to JSON string representation for logging and debugging purposes.
- Template Parameters
-
InStructType The type of the structure to be converted to a JSON string.
- Parameters
-
InStruct The structure instance to be converted.
- Returns
- A
FStringcontaining the JSON string representation of the input structure.
Definition at line 325 of file Sensor.h.
◆ WriteToLogFile()
|
protected |
Write to text file. If the text file doesn't exits, it will be created.
Definition at line 302 of file Sensor.cpp.
References CreateLogFile(), LogFile, and ULogFile::Write().
Referenced by AOverlapSensor::BuildAndSendMessage(), ACamera::CreateLogFile(), ALidar::CreateLogFile(), ATransformSensor::CreateLogFile(), ACollisionSensor::OnActorHit(), ACollisionSensor::OnComponentHit(), ACamera::SaveCameraMetaDataToDisk(), ALidar::SaveLidarMetaDataToDisk(), and ATransformSensor::SaveTransformMetaDataToDisk().
Member Data Documentation
◆ AttachedToBone
| FName ASensor::AttachedToBone |
Definition at line 289 of file Sensor.h.
Referenced by USimulatorJsonExporter::CreateSensorJSONObject().
◆ AttachedToComponent
| FString ASensor::AttachedToComponent |
Definition at line 286 of file Sensor.h.
Referenced by USimulatorJsonExporter::CreateSensorJSONObject().
◆ ComponentsToHide
|
staticprivate |
Definition at line 409 of file Sensor.h.
Referenced by EndPlay(), and HideComponentForAllCameras().
◆ FileSavePath
|
protected |
Definition at line 372 of file Sensor.h.
Referenced by CreateDataSavePath(), ACollisionSensor::CreateDataSavePath(), AOverlapSensor::CreateDataSavePath(), ATransformSensor::CreateDataSavePath(), ACamera::CreateLogFile(), ACollisionSensor::CreateLogFile(), ALidar::CreateLogFile(), AOverlapSensor::CreateLogFile(), ATransformSensor::CreateLogFile(), ALidar::SaveDataToDisk(), and ACamera::SaveImageToDisk().
◆ LogFile
|
protected |
Definition at line 367 of file Sensor.h.
Referenced by CreateLogFile(), ACamera::CreateLogFile(), ACollisionSensor::CreateLogFile(), ALidar::CreateLogFile(), AOverlapSensor::CreateLogFile(), ATransformSensor::CreateLogFile(), EndPlay(), ACamera::SaveCameraMetaDataToDisk(), ALidar::SaveLidarMetaDataToDisk(), ATransformSensor::SaveTransformMetaDataToDisk(), and WriteToLogFile().
◆ NiagaraHitColors
|
inlinestaticprotected |
Definition at line 382 of file Sensor.h.
Referenced by ALidar::UpdateLidarParticles().
◆ NiagaraHitPoints
|
inlinestaticprotected |
Definition at line 381 of file Sensor.h.
Referenced by ARadar::SimulateRadar(), and ALidar::UpdateLidarParticles().
◆ NiagaraPointsFloat
|
inlinestaticprotected |
Definition at line 383 of file Sensor.h.
Referenced by ARadar::SimulateRadar(), and ALidar::UpdateLidarParticles().
◆ NiagaraPointsInt
|
inlinestaticprotected |
Definition at line 380 of file Sensor.h.
Referenced by ARadar::SimulateRadar(), and ALidar::UpdateLidarParticles().
◆ OnPrimitiveAdded
|
staticprotected |
Definition at line 377 of file Sensor.h.
Referenced by ACamera::BeginPlay(), and HideComponentForAllCameras().
◆ OnSensorDestroy
| FSensorDestroy ASensor::OnSensorDestroy |
◆ ParentActor
|
protected |
Definition at line 370 of file Sensor.h.
Referenced by ATransformSensor::CreateDataSavePath(), and IsAttachedToVehicle().
◆ ROSConnected
|
private |
Definition at line 407 of file Sensor.h.
Referenced by BeginPlay(), and ROSBridgeStateChanged().
◆ ROSInstance
|
protected |
Definition at line 375 of file Sensor.h.
Referenced by BeginPlay(), CreateROSTopic(), ADVSCamera::CreateROSTopic(), ATransformSensor::CreateROSTopic(), and EndPlay().
◆ ROSTopic
|
protected |
Definition at line 361 of file Sensor.h.
Referenced by CreateROSTopic(), ADVSCamera::CreateROSTopic(), DestroyROSTopic(), and ATransformSensor::DestroyROSTopic().
◆ SendDataToROS
|
protected |
Definition at line 364 of file Sensor.h.
Referenced by ALidar::ChangeParameters(), CreateROSTopic(), ACamera::FrameGrabberCapture(), ACamera::ReadPixelsCapture(), ALidar::SendData(), ALidar::SendDataToTopic(), ACamera::SendImageDataToROS(), ARadar::SendRadarData(), ADVSCamera::SendRawDVSImageDataToROS(), ARadar::SetRadarParameters(), and ACamera::SetupCamera().
◆ SensorIdentifier
◆ SensorModel
|
private |
◆ SensorName
◆ SimulateThisSensor
The documentation for this class was generated from the following files:
- Unreal/Agrarsense/Source/Agrarsense/Sensor/Sensor.h
- Unreal/Agrarsense/Source/Agrarsense/Sensor/Sensor.cpp