#include <Lidar.h>
Public Member Functions | |
| ALidar (const FObjectInitializer &ObjectInitializer) | |
| void | Init (FLidarParameters parameters, bool SimulateSensor=true) |
| virtual ESensorTypes | GetSensorType () const override |
| void | ChangeLidarParameters (FLidarParameters newLidarParameters) |
| void | SetVisualizeLidarParticles (bool Visualize) |
| void | SetParticleLifeTime (float ParticleLifeTime) |
| FLidarParameters | GetLidarParameters () const |
| UNiagaraComponent * | GetNiagaraComponent () const |
| virtual FString | GetParametersAsString () const override |
| void | ForceClearContainers () |
| void | SaveCurrentPointCloudToDisk () |
 Public Member Functions inherited from ASensor Public Member Functions inherited from ASensor | |
| ASensor (const FObjectInitializer &ObjectInitializer) | |
| FString | ExportToJsonFile (const FString &FileName) |
| virtual ESensorTypes | GetSensorType () const |
| FString | GetSensorIdentifier () const |
| void | SetSensorIdentifier (const FString newIdentifier) |
| FString | GetSensorName () const |
| virtual FString | GetParametersAsString () const |
| AVehicle * | IsAttachedToVehicle () const |
| void | SetSensorName (const FString newName) |
| FString | GetTopicName () |
| UTopic * | GetROSTopic () const |
| void | SetSimulateSensor (bool SimulateSensor) |
| bool | CanSimulateSensor () const |
| ASensorModel * | GetSensorModel () const |
| void | SetSensorModel (ASensorModel *NewSensorModel) |
| FORCEINLINE bool | IsROSConnected () const |
| UROSIntegrationGameInstance * | GetROSGameInstance () const |
| virtual FString | GetActorID_Implementation () const override |
| virtual FString | GetActorName_Implementation () const override |
| virtual FString | GetActorInformation_Implementation () const override |
| virtual void | SetActorName_Implementation (const FString &NewActorName) override |
| virtual void | SetActorIDAndName_Implementation (const FString &NewActorName, const FString &NewID) override |
| void | SetParentActorPtr (AActor *ParentActorPtr) |
| Public Member Functions inherited from IActorInformation | |
| FString | GetActorID () const |
| FString | GetActorName () const |
| FString | GetActorInformation () const |
| void | SetActorName (const FString &NewActorName) |
| void | SetActorIDAndName (const FString &NewActorName, const FString &NewID) |
Protected Member Functions | |
| virtual void | BeginPlay () override |
| virtual void | EndPlay (const EEndPlayReason::Type EndPlayReason) override |
| void | CreateLogFile () override |
| void | SaveLidarMetaDataToDisk (const FString &FileName) |
| Protected Member Functions inherited from ASensor | |
| virtual void | BeginPlay () override |
| virtual void | EndPlay (const EEndPlayReason::Type EndPlayReason) override |
| FString | CreateTimeStampString () const |
| virtual void | CreateROSTopic () |
| virtual void | DestroyROSTopic () |
| virtual void | CreateDataSavePath () |
| bool | IsLogFileCreated () |
| virtual void | CreateLogFile () |
| void | WriteToLogFile (const FString &Message) |
Private Member Functions | |
| std::vector< FPointData > | SimulateRaycastLidar (const float DeltaTime) |
| void | SetNiagaraRendering (bool Enabled) |
| void | VisualizeLidarParticles (std::vector< FPointData > HitPoints) |
| void | ChangeParameters () |
| FORCEINLINE bool | ShootLaser (const UWorld *World, FHitResult &HitResult, const FVector &EndTrace, const FCollisionQueryParams &TraceParams, const FVector &LidarBodyLocation, const int32 Channel, const bool Semantic, const uint32 RGBDefault, const bool UseLidarNoiseModel) |
| void | ResetRecordedHits (int32 MaxPointsPerChannel) |
| FORCEINLINE uint32 | GetSemanticData (const FHitResult &HitResult) const |
| void | SendData (const float DeltaTime) |
| bool | CanSendData (const float DeltaTime) |
| void | SendDataToTopic (const std::vector< FPointData > &points) |
| void | SaveDataToDisk () |
| void | AddProcessingToHitResult (FHitResult &HitResult, const FVector &LidarBodyLocation, const bool UseHorizontalNoise, const bool UseSnowTerrainAdjustment) |
| void | AddDistanceNoise (FHitResult &HitResult, const FVector &LidarBodyLocation) |
| void | AddLateralNoise (FHitResult &HitResult, const FVector &LidarBodyLocation, const bool UseHorizontalNoise) |
| void | AddSnowTerrainAdjustment (FHitResult &HitResult, const FVector &LidarBodyLocation) |
| void | UpdateLidarParticles (int32 NumberOfHits, const TArray< FVector > &HitPoints, const TArray< FLinearColor > &Colors) |
| void | OnWeatherChanged (FWeatherParameters WeatherParams) |
Friends | |
| class | ALidarManager |
Additional Inherited Members | |
| Static Public Member Functions inherited from ASensor | |
| static void | HideComponentForAllCameras (UPrimitiveComponent *PrimitiveComponent) |
| static TMap< FString, FColor > | GetSemanticColors () |
| static TArray< TWeakObjectPtr< UPrimitiveComponent > > | GetComponentsToHide () |
| Static Public Member Functions inherited from IActorInformation | |
| static void | SetAndValidateActorIDAndName (FString &ActorName, FString &ActorID, TWeakObjectPtr< AActor > Actor) |
| static bool | DestroyActorByID (const FString &ID) |
| static AActor * | GetActorByID (const FString &ID) |
| template<typename T > | |
| static TArray< T * > | GetActorsWithInterface () |
| static void | PrintAllIds () |
| Public Attributes inherited from ASensor | |
| FSensorDestroy | OnSensorDestroy |
| FString | AttachedToComponent |
| FName | AttachedToBone |
| Static Protected Member Functions inherited from ASensor | |
| template<typename InStructType > | |
| static FString | StructToString (const InStructType &InStruct) |
| Protected Attributes inherited from ASensor | |
| UTopic * | ROSTopic = nullptr |
| bool | SendDataToROS = true |
| ULogFile * | LogFile = nullptr |
| AActor * | ParentActor = nullptr |
| FString | FileSavePath |
| UROSIntegrationGameInstance * | ROSInstance = nullptr |
| Static Protected Attributes inherited from ASensor | |
| static FPrimitiveAdded | OnPrimitiveAdded |
| static const FName | NiagaraPointsInt = "User.PointCount" |
| static const FName | NiagaraHitPoints = "User.HitPoints" |
| static const FName | NiagaraHitColors = "User.HitColors" |
| static const FName | NiagaraPointsFloat = "User.Test" |
Detailed Description
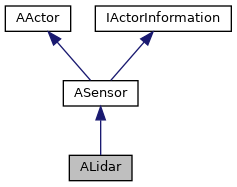
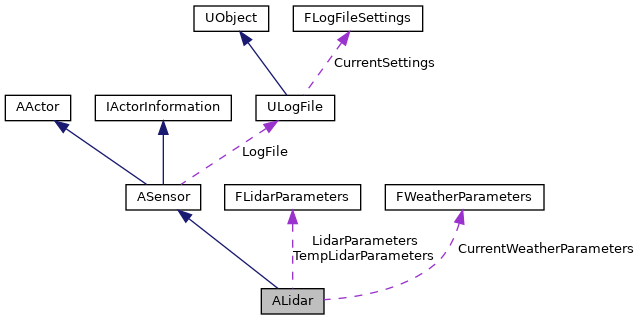
Parameterized linetrace based Lidar sensor. Parameters defined in FLidarParameters struct. This Sensor Actor is ticked by LidarManager where all added Lidar sensors are ticked in parallel.
Constructor & Destructor Documentation
◆ ALidar()
| ALidar::ALidar | ( | const FObjectInitializer & | ObjectInitializer | ) |
Member Function Documentation
◆ AddDistanceNoise()
|
private |
Definition at line 395 of file Lidar.cpp.
References FLidarParameters::DistanceNoiseStdDev, Generator, and LidarParameters.
Referenced by AddProcessingToHitResult().
◆ AddLateralNoise()
|
private |
Definition at line 404 of file Lidar.cpp.
References Generator, FLidarParameters::LateralNoiseStdDev, and LidarParameters.
Referenced by AddProcessingToHitResult().
◆ AddProcessingToHitResult()
|
private |
Definition at line 377 of file Lidar.cpp.
References AddDistanceNoise(), AddLateralNoise(), AddSnowTerrainAdjustment(), FLidarParameters::DistanceNoiseStdDev, FLidarParameters::LateralNoiseStdDev, and LidarParameters.
Referenced by SimulateRaycastLidar().
◆ AddSnowTerrainAdjustment()
|
private |
Definition at line 426 of file Lidar.cpp.
References SnowHeightOffset, and TerrainTag.
Referenced by AddProcessingToHitResult().
◆ BeginPlay()
|
overrideprotectedvirtual |
Reimplemented from ASensor.
Definition at line 58 of file Lidar.cpp.
References ALidarManager::AddRaycastLidar(), CachedNoneColor, CachedSnowflakeColor, CurrentWeatherParameters, AWeather::GetCurrentWeather(), UAgrarsenseStatics::GetLidarManager(), ASensor::GetSemanticColors(), UAgrarsenseStatics::GetWeatherActor(), ASensor::HideComponentForAllCameras(), NiagaraComponent, OnWeatherChanged(), AWeather::OnWeatherChanged, SemanticColors, and SetParticleLifeTime().
◆ CanSendData()
|
private |
Checks can sensor send data in this tick
Definition at line 526 of file Lidar.cpp.
References ClearContainers, SendDataEveryFrame, SensorHzFrequency, and SensorHzTimer.
Referenced by SendData().
◆ ChangeLidarParameters()
| void ALidar::ChangeLidarParameters | ( | FLidarParameters | newLidarParameters | ) |
Change Lidar parameter for this sensor.
- Parameters
-
newLidarParameters FLidarParameters struct
Definition at line 548 of file Lidar.cpp.
References ASensor::CanSimulateSensor(), ChangeParameters(), LidarParameters, LidarParametersChanged, and TempLidarParameters.
◆ ChangeParameters()
|
private |
Change this Lidar sensor parameters
Definition at line 167 of file Lidar.cpp.
References FLidarParameters::Channels, ASensor::CreateROSTopic(), FLidarParameters::DistanceNoiseStdDev, FLidarParameters::HorizontalFov, LaserAngles, FLidarParameters::LateralNoiseStdDev, LidarParameters, SimulatorLog::Log(), FLidarParameters::LowerFovLimit, Points, FLidarParameters::PointsPerSecond, PreProcessedHitImpactPoints, FLidarParameters::RotationFrequency, FLidarParameters::SendDataAtRotationFrequency, SendDataEveryFrame, FLidarParameters::SendDataToROS, ASensor::SendDataToROS, SensorHzFrequency, SetVisualizeLidarParticles(), FLidarParameters::UpperFovLimit, and FLidarParameters::VisualizePointcloud.
Referenced by ChangeLidarParameters(), Init(), and SimulateRaycastLidar().
◆ CreateLogFile()
|
overrideprotectedvirtual |
Create Text file for this sensor if it has not been created already. Text file will be created to ROOT/Data/Run/Logs directory. Filename will be SensorName_ID_UnixTimestamp.txt Can be overriden by individual sensor if needed.
Reimplemented from ASensor.
Definition at line 753 of file Lidar.cpp.
References ULogFile::Create(), FLogFileSettings::FileCreationOptions, FLogFileSettings::FilePath, ASensor::FileSavePath, FLogFileSettings::FileWriteOptions, GeoReferencingSystem, FLogFileSettings::KeepFileOpen, ASensor::LogFile, FLogFileSettings::OverrideFilePath, Overwrite, Queue, FLogFileSettings::QueueLength, FLogFileSettings::Timestamp, and ASensor::WriteToLogFile().
Referenced by Init().
◆ EndPlay()
|
overrideprotectedvirtual |
Reimplemented from ASensor.
Definition at line 118 of file Lidar.cpp.
References UAgrarsenseStatics::GetLidarManager(), UAgrarsenseStatics::GetWeatherActor(), LaserAngles, NiagaraComponent, OnWeatherChanged(), AWeather::OnWeatherChanged, PointCloudMessage, Points, PointsFlattened, PreProcessedHitImpactPoints, ALidarManager::RemoveRaycastLidar(), and SetNiagaraRendering().
◆ ForceClearContainers()
|
inline |
Definition at line 110 of file Lidar.h.
Referenced by ADataCapture::UpdatePositions().
◆ GetLidarParameters()
|
inline |
Get current Lidar parameters
- Returns
- FLidarParameters struct
Definition at line 83 of file Lidar.h.
Referenced by USimulatorJsonExporter::ExportSensorToJSON().
◆ GetNiagaraComponent()
|
inline |
Retrieves the Niagara component associated with this sensor.
- Returns
- A pointer to the UNiagaraComponent instance associated with this sensor.
◆ GetParametersAsString()
|
inlineoverridevirtual |
Get current LidarParameters struct fields as one string.
Reimplemented from ASensor.
◆ GetSemanticData()
|
private |
Retrieve semantic data based on the object hit by the line trace.
- Parameters
-
HitResult The result of the line trace indicating the object hit.
- Returns
- The semantic data associated with the hit object.
Definition at line 564 of file Lidar.cpp.
References CachedNoneColor, CachedSnowflakeColor, and SemanticColors.
Referenced by ShootLaser(), and SimulateRaycastLidar().
◆ GetSensorType()
|
inlineoverridevirtual |
◆ Init()
| void ALidar::Init | ( | FLidarParameters | parameters, |
| bool | SimulateSensor = true |
||
| ) |
Initialize new Lidar sensor
- Parameters
-
parameters FLidarParameters struct
Definition at line 42 of file Lidar.cpp.
References ChangeParameters(), ASensor::CreateDataSavePath(), CreateLogFile(), Generator, LidarParameters, PointCloudMessage, RandomDevice, and ASensor::SetSimulateSensor().
Referenced by USensorFactory::SpawnLidarSensor().
◆ OnWeatherChanged()
|
private |
Definition at line 155 of file Lidar.cpp.
References CurrentWeatherParameters, FWeatherParameters::SnowAmount, and SnowHeightOffset.
Referenced by BeginPlay(), and EndPlay().
◆ ResetRecordedHits()
|
private |
Reset and possibly re-allocate needed arrays.
Definition at line 649 of file Lidar.cpp.
References FLidarParameters::Channels, ClearContainers, LidarParameters, Points, PointsFlattened, FLidarParameters::PointsPerSecond, PreProcessedHitImpactPoints, FLidarParameters::SavePointcloudWithoutNoiseModel, SendDataEveryFrame, and VisualizeLidarParticles().
Referenced by SimulateRaycastLidar().
◆ SaveCurrentPointCloudToDisk()
|
inline |
Definition at line 118 of file Lidar.h.
Referenced by ADataCapture::CaptureDataNow().
◆ SaveDataToDisk()
|
private |
Definition at line 715 of file Lidar.cpp.
References ASensor::FileSavePath, LidarSaves, NeedToSavePointCloudWithoutNoise, PointsFlattened, PreProcessedHitImpactPoints, SaveLidarMetaDataToDisk(), and UPointcloudUtilities::SaveVectorArrayAsPlyAsync().
Referenced by SendData().
◆ SaveLidarMetaDataToDisk()
|
protected |
Definition at line 789 of file Lidar.cpp.
References ASensor::CreateTimeStampString(), GeoReferencingSystem, ASensor::LogFile, UCoordinateConversionUtilities::UnrealToGeographicCoordinates(), and ASensor::WriteToLogFile().
Referenced by SaveDataToDisk().
◆ SendData()
|
private |
Send data to topics and save point cloud to disk if that's enabled. Before sending and saving, CanSendData is checked.
Definition at line 490 of file Lidar.cpp.
References CanSendData(), LidarParameters, Points, PointsFlattened, SaveCurrentPointCloudToDiskRequested, SaveDataToDisk(), FLidarParameters::SaveDataToDisk, ASensor::SendDataToROS, and SendDataToTopic().
Referenced by SimulateRaycastLidar().
◆ SendDataToTopic()
|
private |
Definition at line 692 of file Lidar.cpp.
References ASensor::GetROSTopic(), ASensor::IsROSConnected(), PointCloudMessage, and ASensor::SendDataToROS.
Referenced by SendData().
◆ SetNiagaraRendering()
|
private |
Set Niagara component rendering on/off
- Parameters
-
bEnabled boolean to set Niagara rendering on/off
Definition at line 215 of file Lidar.cpp.
References NiagaraComponent, and UpdateLidarParticles().
Referenced by EndPlay(), and SetVisualizeLidarParticles().
◆ SetParticleLifeTime()
| void ALidar::SetParticleLifeTime | ( | float | ParticleLifeTime | ) |
Set Niagara particle lifetime (default 2 seconds)
- Parameters
-
particleLifeTime new lifetime as float
Definition at line 241 of file Lidar.cpp.
References NiagaraComponent.
Referenced by BeginPlay().
◆ SetVisualizeLidarParticles()
| void ALidar::SetVisualizeLidarParticles | ( | bool | Visualize | ) |
Set boolean whether Lidar sensors be visualized
- Parameters
-
bVisualize boolean to set visualization on/off
Definition at line 210 of file Lidar.cpp.
References SetNiagaraRendering().
Referenced by ChangeParameters().
◆ ShootLaser()
|
private |
This function calculates the impact point of the laser shot based on provided parameters, considering the specified vertical and horizontal angles, collision parameters, Lidar body location, Lidar body rotation, and the specified range.
- Returns
- true if the laser shot hits a valid target, false otherwise.
Definition at line 588 of file Lidar.cpp.
References LidarNoiseModel::CheckSnowflakeHit(), CurrentWeatherParameters, GetSemanticData(), NeedToSavePointCloudWithoutNoise, PreProcessedHitImpactPoints, and FPointData::X.
Referenced by SimulateRaycastLidar().
◆ SimulateRaycastLidar()
|
private |
Simulate this Lidar sensor. Should only be called by LidarManager.
- Parameters
-
DeltaTime current DeltaTime
Definition at line 249 of file Lidar.cpp.
References AddProcessingToHitResult(), ASensor::CanSimulateSensor(), ChangeParameters(), FLidarParameters::Channels, ClearContainers, CurrentHorizontalAngle, CurrentWeatherParameters, FLidarParameters::DistanceNoiseStdDev, GetSemanticData(), FLidarParameters::HorizontalFov, FWeatherParameters::IsLidarNoiseModelCondition(), FWeatherParameters::IsWinterSnowCondition(), LaserAngles, FLidarParameters::LateralNoiseStdDev, LidarParameters, LidarParametersChanged, NeedToSavePointCloudWithoutNoise, Points, PointsFlattened, FLidarParameters::PointsPerSecond, FLidarParameters::Range, ResetRecordedHits(), FLidarParameters::RotationFrequency, FLidarParameters::SaveDataToDisk, FLidarParameters::SavePointcloudWithoutNoiseModel, FLidarParameters::Semantic, SendData(), FLidarParameters::SendDataToCombinedROSTopic, ShootLaser(), SimulateRaycastLidar(), TempLidarParameters, FLidarParameters::UseComplexCollisionTrace, FLidarParameters::UseLidarNoiseModel, and FLidarParameters::UseTerrainSnowHitAdjustment.
Referenced by ALidarManager::SimulateLidars(), and SimulateRaycastLidar().
◆ UpdateLidarParticles()
|
private |
Definition at line 230 of file Lidar.cpp.
References NiagaraComponent, ASensor::NiagaraHitColors, ASensor::NiagaraHitPoints, ASensor::NiagaraPointsFloat, and ASensor::NiagaraPointsInt.
Referenced by SetNiagaraRendering(), and VisualizeLidarParticles().
◆ VisualizeLidarParticles()
|
private |
Visualize Lidar particles with Niagara particle system
Definition at line 438 of file Lidar.cpp.
References LidarParameters, NiagaraComponent, FPointData::RGB, FLidarParameters::Semantic, UpdateLidarParticles(), VisualizeLidarParticles(), FLidarParameters::VisualizePointcloud, FPointData::X, FPointData::Y, and FPointData::Z.
Referenced by ResetRecordedHits(), and VisualizeLidarParticles().
Friends And Related Function Documentation
◆ ALidarManager
|
friend |
Member Data Documentation
◆ CachedNoneColor
|
private |
Definition at line 292 of file Lidar.h.
Referenced by BeginPlay(), and GetSemanticData().
◆ CachedSnowflakeColor
|
private |
Definition at line 294 of file Lidar.h.
Referenced by BeginPlay(), and GetSemanticData().
◆ ClearContainers
|
private |
Definition at line 298 of file Lidar.h.
Referenced by CanSendData(), ResetRecordedHits(), and SimulateRaycastLidar().
◆ CurrentHorizontalAngle
|
private |
Definition at line 284 of file Lidar.h.
Referenced by SimulateRaycastLidar().
◆ CurrentWeatherParameters
|
private |
Definition at line 261 of file Lidar.h.
Referenced by BeginPlay(), OnWeatherChanged(), ShootLaser(), and SimulateRaycastLidar().
◆ Generator
|
private |
Definition at line 276 of file Lidar.h.
Referenced by AddDistanceNoise(), AddLateralNoise(), and Init().
◆ GeoReferencingSystem
|
private |
Definition at line 254 of file Lidar.h.
Referenced by CreateLogFile(), and SaveLidarMetaDataToDisk().
◆ LaserAngles
|
private |
Definition at line 273 of file Lidar.h.
Referenced by ChangeParameters(), EndPlay(), and SimulateRaycastLidar().
◆ LidarParameters
|
private |
Definition at line 257 of file Lidar.h.
Referenced by AddDistanceNoise(), AddLateralNoise(), AddProcessingToHitResult(), ChangeLidarParameters(), ChangeParameters(), Init(), ResetRecordedHits(), SendData(), SimulateRaycastLidar(), and VisualizeLidarParticles().
◆ LidarParametersChanged
|
private |
Definition at line 279 of file Lidar.h.
Referenced by ChangeLidarParameters(), and SimulateRaycastLidar().
◆ LidarSaves
|
private |
Definition at line 290 of file Lidar.h.
Referenced by SaveDataToDisk().
◆ NeedToSavePointCloudWithoutNoise
|
private |
Definition at line 278 of file Lidar.h.
Referenced by SaveDataToDisk(), ShootLaser(), and SimulateRaycastLidar().
◆ NiagaraComponent
|
private |
NiagaraComponent for visualizing Lidar particles. Particles are only visible on Spectator camera.
Definition at line 148 of file Lidar.h.
Referenced by BeginPlay(), EndPlay(), SetNiagaraRendering(), SetParticleLifeTime(), UpdateLidarParticles(), and VisualizeLidarParticles().
◆ PointCloudMessage
|
private |
Definition at line 266 of file Lidar.h.
Referenced by EndPlay(), Init(), and SendDataToTopic().
◆ Points
|
private |
Definition at line 270 of file Lidar.h.
Referenced by ChangeParameters(), EndPlay(), ResetRecordedHits(), SendData(), and SimulateRaycastLidar().
◆ PointsFlattened
|
private |
Definition at line 271 of file Lidar.h.
Referenced by EndPlay(), ResetRecordedHits(), SaveDataToDisk(), SendData(), and SimulateRaycastLidar().
◆ PreProcessedHitImpactPoints
|
private |
Definition at line 268 of file Lidar.h.
Referenced by ChangeParameters(), EndPlay(), ResetRecordedHits(), SaveDataToDisk(), and ShootLaser().
◆ RandomDevice
|
private |
◆ SaveCurrentPointCloudToDiskRequested
|
private |
Definition at line 296 of file Lidar.h.
Referenced by SendData().
◆ SemanticColors
|
private |
Definition at line 264 of file Lidar.h.
Referenced by BeginPlay(), and GetSemanticData().
◆ SendDataEveryFrame
|
private |
Definition at line 280 of file Lidar.h.
Referenced by CanSendData(), ChangeParameters(), and ResetRecordedHits().
◆ SensorHzFrequency
|
private |
Definition at line 285 of file Lidar.h.
Referenced by CanSendData(), and ChangeParameters().
◆ SensorHzTimer
|
private |
Definition at line 286 of file Lidar.h.
Referenced by CanSendData().
◆ SnowHeightOffset
|
private |
Definition at line 288 of file Lidar.h.
Referenced by AddSnowTerrainAdjustment(), and OnWeatherChanged().
◆ TempLidarParameters
|
private |
Definition at line 259 of file Lidar.h.
Referenced by ChangeLidarParameters(), and SimulateRaycastLidar().
◆ TerrainTag
|
private |
Definition at line 282 of file Lidar.h.
Referenced by AddSnowTerrainAdjustment().
The documentation for this class was generated from the following files: