Table of Contents
- Documentation
- Walker System Basics
- Spawning Walkers through User Interface
- Exporting Walkers into JSON files through user interface
- Exporting Walkers into JSON through ROS
- Exporting Walkers into JSON through developer tools
- Destroying Walkers through User Interface
- Destroying Walkers through ROS
- Spawning Stationary Walker through ROS
- Spawning Roaming Walker through ROS
- Spawning "Follow path" Walker through ROS
- Override Walker to move towards certain position
- Pausing and resuming Walker through ROS
Documentation
| Topic | Link |
|---|---|
| Getting Started | Getting Started |
| Using the Simulator | Using the Simulator |
| Using Vehicles | Using Vehicles |
| Using Walkers | Using Walkers |
| Sensors | Sensors |
| Data collection | Data collection |
| Creating own maps | Creating own maps |
| Building from source on Linux | Building on Linux |
| Building from source on Windows | Building on Windows |
| Installing on Linux | Installing on Linux |
| Installing on Windows | Installing on Windows |
Walker System Basics
The Simulator Walker system allows to spawn few types of Walkers and also allows making Walkers that are either Stationary, Roam randominly across the map or be set to follow given path. Any spawned Walker can also be overriden to Walk or teleported to given location.
The Simulator has following types of Walkers.
| type | model |
|---|---|
walker | Reindeer |
walker | Moose |
walker | Worker |
When spawning a Walker you need to define few parameters:
WalkerSpeed - Speed of the Walker
WalkerAction - What is the Walker action type: Stationary / Roaming / Follow path
WalkerEndAction - What does the Walker do when destionation is reached: Destroy / Repeat from start / Go backwards / Stop until destroyed manually
When spawning Walker with WalkerAction of Stationary or Roaming, WalkerEndAction is ignored.
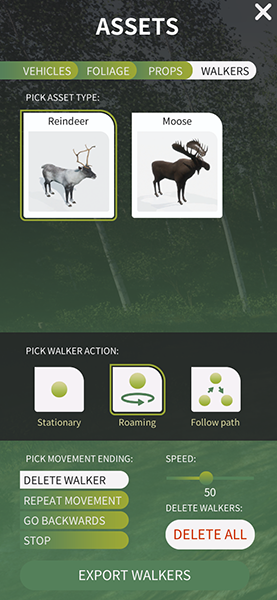
Spawning Walkers through User Interface

- Open Asset Placement tool from right top menu toolbar menu
- Open the Walkers-tab
- Select Walker you want to spawn
Select desired Walker parameters:
4.1 Select Walker Action
4.2 Select Movement End Action
4.3 Select Walker Speed with the SPEED-slider
- Select position you want Walker to spawned with left click. If selected Walker Action is Follow path, you need to select at least two points and then you can click Spawn Walker.
Exporting Walkers into JSON files through user interface
After spawning Walker or multiple Walker, you can export all of them into separate JSON files by clicking "Export Walkers" button in the Walker user interface, and then giving a filename to use as prefix for the files.
Walker(s) will be exported into SIMULATOR_ROOT/Data/ExportedJsonFiles directory and the JSON file(s) will include Walker type and its current parameters.

Exporting Walkers into JSON through ROS
Walker(s) will be exported into SIMULATOR_ROOT/Data/ExportedJsonFiles directory and the JSON file(s) will include Walker type and its current parameters.
Exporting Walkers into JSON through developer tools
Click CTRL + F9 and then click "Export Walkers" Button. This will export walkers to JSON file(s) to SIMULATOR_ROOT/Data/ExportedJsonFiles directory.
Walker(s) will be exported into SIMULATOR_ROOT/Data/ExportedJsonFiles directory and the JSON file(s) will include Walker type and its current parameters.
Destroying Walkers through User Interface
To destroy all Walkers:
- Open Asset Placement tool from right top menu toolbar menu
- Open the Walkers-tab
- Click "Delete All" and then click "Confirm".
To destroy individual Walker:
- Right click Walker to open up a context menu. If menu is not showing up, make sure asset placement menu or any other openable menu is not open.
- Click Remove from the context menu
Destroying Walkers through ROS
To destroy all Walkers through ROS:
To Destroy individual Walker through ROS:
Spawning Stationary Walker through ROS
You can spawn Walker through ROS by using SpawnObjects command which takes .json file path.
The .json file structure should look something like this:
Spawning Roaming Walker through ROS
You can spawn Walker through ROS by using SpawnObjects command which takes .json file path.
The .json file structure should look something like this:
Spawning "Follow path" Walker through ROS
You can spawn Walker through ROS by using SpawnObjects command which takes .json file path.
The .json file structure should look something like this:
Override Walker to move towards certain position
To override a Walker to start moving towards certain position you can use either ROS Command MoveWalkerTo or MoveWalkerToAndDestroy command.
MoveWalkerTo Command will command the Walker to start moving towards given position, and if Walker arrives at given position, the walker will stop until it is destroyed or new position is given.
Both of these commands take in ID X,Y,Z or ID X,Y,Z,Pitch,Roll,Yaw
MoveWalkerToAndDestroy does almost the same as MoveWalkerTo command but if Walker arrives at given position it will destroy itself automatically.
Note. The Simulator does check whether given path is reachable or not.
Pausing and resuming Walker through ROS
You can pause/resume Walker movement by using PauseWalker ID or ResumeWalker ID ROS Command like below: