#include <AgrarsenseGameModeBase.h>
Public Member Functions | |
| AAgrarsenseGameModeBase (const FObjectInitializer &ObjectInitializer) | |
| ALidarManager * | GetLidarManager () |
| UROSHandler * | GetROSHandle () |
| ASimulationLevelManager * | GetSimulationLevelManager () |
| AInstancedRendererManager * | GetInstancedRenderer () |
| AWeather * | GetWeatherActor () |
| ASpectator * | GetSpectator () |
| UROSCommands * | GetROSCommands () |
Public Attributes | |
| TSubclassOf< ALidarManager > | LidarManagerClass |
| TSubclassOf< UUserWidget > | DeveloperTools |
| TSubclassOf< ASimulationLevelManager > | SimulationLevelManagerClass |
Protected Member Functions | |
| void | InitGame (const FString &MapName, const FString &Options, FString &ErrorMessage) override |
| void | BeginPlay () override |
| void | EndPlay (const EEndPlayReason::Type EndPlayReason) override |
Private Member Functions | |
| void | ParseMapChangeLaunchArgument () |
| void | SpawnNeededActorsInitGame () |
| void | SpawnNeededActorsBeginPlay () |
Private Attributes | |
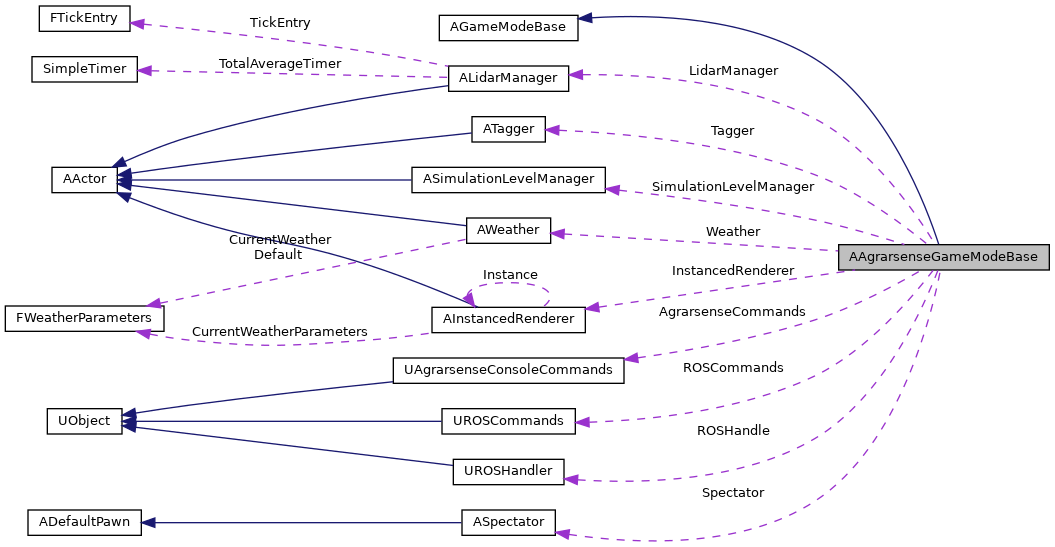
| ALidarManager * | LidarManager = nullptr |
| UROSHandler * | ROSHandle = nullptr |
| ASimulationLevelManager * | SimulationLevelManager = nullptr |
| AInstancedRendererManager * | InstancedRenderer = nullptr |
| AWeather * | Weather = nullptr |
| UROSCommands * | ROSCommands = nullptr |
| ASpectator * | Spectator = nullptr |
| ATagger * | Tagger = nullptr |
Static Private Attributes | |
| static bool | AttemptToLaunchROSBridge = true |
| static bool | StartMessageLogged = false |
| static bool | MapChanged = false |
Detailed Description
Definition at line 32 of file AgrarsenseGameModeBase.h.
Constructor & Destructor Documentation
◆ AAgrarsenseGameModeBase()
| AAgrarsenseGameModeBase::AAgrarsenseGameModeBase | ( | const FObjectInitializer & | ObjectInitializer | ) |
Definition at line 33 of file AgrarsenseGameModeBase.cpp.
Member Function Documentation
◆ BeginPlay()
|
overrideprotected |
Entry point to the simulation after InitGame.
Definition at line 45 of file AgrarsenseGameModeBase.cpp.
References ParseMapChangeLaunchArgument(), and SpawnNeededActorsBeginPlay().
◆ EndPlay()
|
overrideprotected |
Called when simulation ends.
Definition at line 54 of file AgrarsenseGameModeBase.cpp.
References UInfoTopic::Destroy(), UROSCommands::Destroy(), SimulatorLog::Log(), ROSCommands, and SimulatorLog::Shutdown().
◆ GetInstancedRenderer()
|
inline |
Get Instanced Renderer pointer.
- Returns
- AInstancedRenderer actor pointer or nullptr if AInstancedRendererManager doesn't exists in the level.
Definition at line 76 of file AgrarsenseGameModeBase.h.
Referenced by UAgrarsenseStatics::GetInstancedRenderer().
◆ GetLidarManager()
|
inline |
Get the Lidar Manager instance
- Returns
- Pointer to the Lidar Manager or nullptr
Definition at line 46 of file AgrarsenseGameModeBase.h.
Referenced by UAgrarsenseStatics::GetLidarManager().
◆ GetROSCommands()
|
inline |
Get UROSCommands pointer.
- Returns
- UROSCommands pointer or nullptr
Definition at line 106 of file AgrarsenseGameModeBase.h.
◆ GetROSHandle()
|
inline |
Get the ROS Handler instance
- Returns
- Pointer to the ROS Handler or nullptr
Definition at line 56 of file AgrarsenseGameModeBase.h.
Referenced by UAgrarsenseStatics::GetROSHandle().
◆ GetSimulationLevelManager()
|
inline |
Get simulation level's manager
- Returns
- Simulation level manager pointer or nullptr
Definition at line 66 of file AgrarsenseGameModeBase.h.
Referenced by UAgrarsenseStatics::GetSimulationLevelManager().
◆ GetSpectator()
|
inline |
Get ASpectator pointer.
- Returns
- AWeather pointer or nullptr
Definition at line 96 of file AgrarsenseGameModeBase.h.
Referenced by UAgrarsenseStatics::GetSpectator().
◆ GetWeatherActor()
|
inline |
Get AWeather pointer.
- Returns
- AWeather pointer or nullptr
Definition at line 86 of file AgrarsenseGameModeBase.h.
Referenced by UAgrarsenseStatics::GetWeatherActor().
◆ InitGame()
|
overrideprotected |
Entry point to the simulation. InitGame is called before BeginPlay
Definition at line 38 of file AgrarsenseGameModeBase.cpp.
References SpawnNeededActorsInitGame().
◆ ParseMapChangeLaunchArgument()
|
private |
Parse launch arguments after begin play.
Definition at line 94 of file AgrarsenseGameModeBase.cpp.
References MapChanged.
Referenced by BeginPlay().
◆ SpawnNeededActorsBeginPlay()
|
private |
Spawn needed Actors or UObjects that should always exist in the level in BeginPlay. This is the Simulator second entry point.
Definition at line 237 of file AgrarsenseGameModeBase.cpp.
References DeveloperTools, UInfoTopic::Init(), UROSCommands::Init(), ROSCommands, Spectator, and Tagger.
Referenced by BeginPlay().
◆ SpawnNeededActorsInitGame()
|
private |
Spawn needed Actors or UObjects that should always exist in the level in InitGame. This is the Simulator entry point.
Definition at line 138 of file AgrarsenseGameModeBase.cpp.
References AttemptToLaunchROSBridge, SimulatorLog::Create(), UAgrarsenseSettings::GetAgrarsenseSettings(), InstancedRenderer, UROSHandler::LaunchROSBridge(), LidarManager, LidarManagerClass, SimulatorLog::Log(), ROSHandle, UROSHandler::Setup(), UAgrarsenseSettings::Setup(), SimulationLevelManager, SimulationLevelManagerClass, StartMessageLogged, and Weather.
Referenced by InitGame().
Member Data Documentation
◆ AttemptToLaunchROSBridge
|
staticprivate |
Definition at line 196 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsInitGame().
◆ DeveloperTools
| TSubclassOf<UUserWidget> AAgrarsenseGameModeBase::DeveloperTools |
DeveloperTools widget. Created when simulation starts. This must be setup in AgrarsenseGameMode in Unreal editor.
Definition at line 123 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsBeginPlay().
◆ InstancedRenderer
|
private |
Definition at line 182 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsInitGame().
◆ LidarManager
|
private |
Definition at line 173 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsInitGame().
◆ LidarManagerClass
| TSubclassOf<ALidarManager> AAgrarsenseGameModeBase::LidarManagerClass |
LidarManager class. Spawned when simulation starts. This must be setup in AgrarsenseGameMode in Unreal editor.
Definition at line 116 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsInitGame().
◆ MapChanged
|
staticprivate |
Definition at line 200 of file AgrarsenseGameModeBase.h.
Referenced by ParseMapChangeLaunchArgument().
◆ ROSCommands
|
private |
Definition at line 188 of file AgrarsenseGameModeBase.h.
Referenced by EndPlay(), and SpawnNeededActorsBeginPlay().
◆ ROSHandle
|
private |
Definition at line 176 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsInitGame().
◆ SimulationLevelManager
|
private |
Definition at line 179 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsInitGame().
◆ SimulationLevelManagerClass
| TSubclassOf<ASimulationLevelManager> AAgrarsenseGameModeBase::SimulationLevelManagerClass |
Simulation level manager class. Spawned when simulation starts. This must be setup in AgrarsenseGameMode in Unreal editor.
Definition at line 130 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsInitGame().
◆ Spectator
|
private |
Definition at line 191 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsBeginPlay().
◆ StartMessageLogged
|
staticprivate |
Definition at line 198 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsInitGame().
◆ Tagger
|
private |
Definition at line 194 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsBeginPlay().
◆ Weather
|
private |
Definition at line 185 of file AgrarsenseGameModeBase.h.
Referenced by SpawnNeededActorsInitGame().
The documentation for this class was generated from the following files:
- Unreal/Agrarsense/Source/Agrarsense/Game/AgrarsenseGameModeBase.h
- Unreal/Agrarsense/Source/Agrarsense/Game/AgrarsenseGameModeBase.cpp