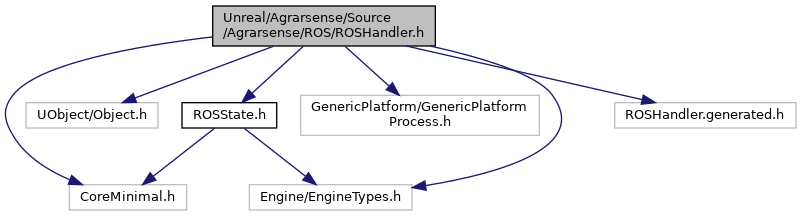
#include "CoreMinimal.h"#include "UObject/Object.h"#include "Engine/EngineTypes.h"#include "GenericPlatform/GenericPlatformProcess.h"#include "ROSState.h"#include "ROSHandler.generated.h"
Include dependency graph for ROSHandler.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | UROSHandler |
Functions | |
| DECLARE_DYNAMIC_MULTICAST_DELEGATE_OneParam (FROSDelegate_ROState, EROSState, rosState) | |
Function Documentation
◆ DECLARE_DYNAMIC_MULTICAST_DELEGATE_OneParam()
| DECLARE_DYNAMIC_MULTICAST_DELEGATE_OneParam | ( | FROSDelegate_ROState | , |
| EROSState | , | ||
| rosState | |||
| ) |
Event when ROS Bridge state changes. Broadcasts ROSState enum (Connected / Disconnected)